
Welcome to my personal website! I am Tinghong Ye (Chinese: 叶庭宏), a highly motivated and passionate undergraduate student majoring in Artificial Intelligence at Huazhong University of Science and Technology (HUST). I am currently a senior (Class of 2022) with a strong academic record and a deep interest in Embodied AI, particularly in Robotics control and perception algorithms.
I am passionate about Embodied AI, focusing on building autonomous systems that can intelligently perceive, navigate, and interact with the physical world. My research integrates state-of-the-art techniques in multi-modal perception, real-time motion planning, and model predictive control (MPC). I apply these principles to challenging platforms like quadruped robots, aiming to enhance their autonomy and adaptability in complex, unstructured environments.
-
3D Vision & Scene Understanding🧠: Construct the SpatialReason benchmark containing multi-hop QA pairs that require complex spatial perception, effectively enhance the interpretability of 3D-VQA reasoning paths.
-
Vision-Language Model Application👀: Built a tactical analysis system based on Vision-Language Models, employing CoT prompting to reason and predict complex sequential actions.
-
Multi-Agent Formation Control🦵: Designing the experiments of CLF-CBF-based algorithms for distributed quadruped robot swarms, optimizing obstacle traversal through hierarchical conflict resolution and dynamic path planning.
-
Sensor-Driven Autonomy🔍: Enhancing environmental perception via LiDAR and depth camera fusion, leveraging LCCP segmentation and RANSAC plane fitting to improve localization accuracy in unstructured scenarios.
-
Real-Time Optimization⚡: Implementing MPC controllers for 12-DOF quadruped robots, balancing computational efficiency and motion precision through C++-based matrix operations and ROS integration.
These innovations have been validated in national robotics competitions and contribute to the development of a more capable and adaptable robotic system capable of navigating complex environments. Pursuing further research in these areas will bridge theoretical advancements with real-world deployability, fostering intelligent robotics that adapt to evolving challenges.
🔥 News
- 2025.09: 🎉 Will be joining the DCD Lab, Zhejiang University, focusing on Embodied AI and MLLM.
- 2025.08: 🤗 Started Research Intern at School of Artificial Intelligence (SAI), SJTU, focusing on collision-free motion control for Franka Emika robots.
- 2025.04: 🤗 Started Research Intern at National Engineering Laboratory for Video Technology – Shenzhen Division, PKU, focusing on 3D Understanding based on MLLM and CoT.
- 2024.05: 🤗 Started Research Intern at Intelligence Manufacturing and Data Science Laboratory, Hust, focusing on Robotics Path-Planning and Control Algorithm.
📝 Publication

A Distributed Quadratic Programming (QP)-based Safe Formation Control Scheme for Multiple Quadruped Robots (Rejected)
Danfu Liu*, Peixuan Song*, Tinghong Ye, Qichen Liang, Jinhui Du, Lijun Zhu and Han Ding
- Introduced a hierarchical control strategy: an upper-layer distributed planner for trajectory generation and a lower-layer MPC-based locomotion controller for trajectory tracking.
- Demonstrated effectiveness through simulations and real-world experiments with Unitree A1 robots, achieving formation control in complex obstacle environments while meeting safety constraints.
- The project code will be released after acceptance of the paper.
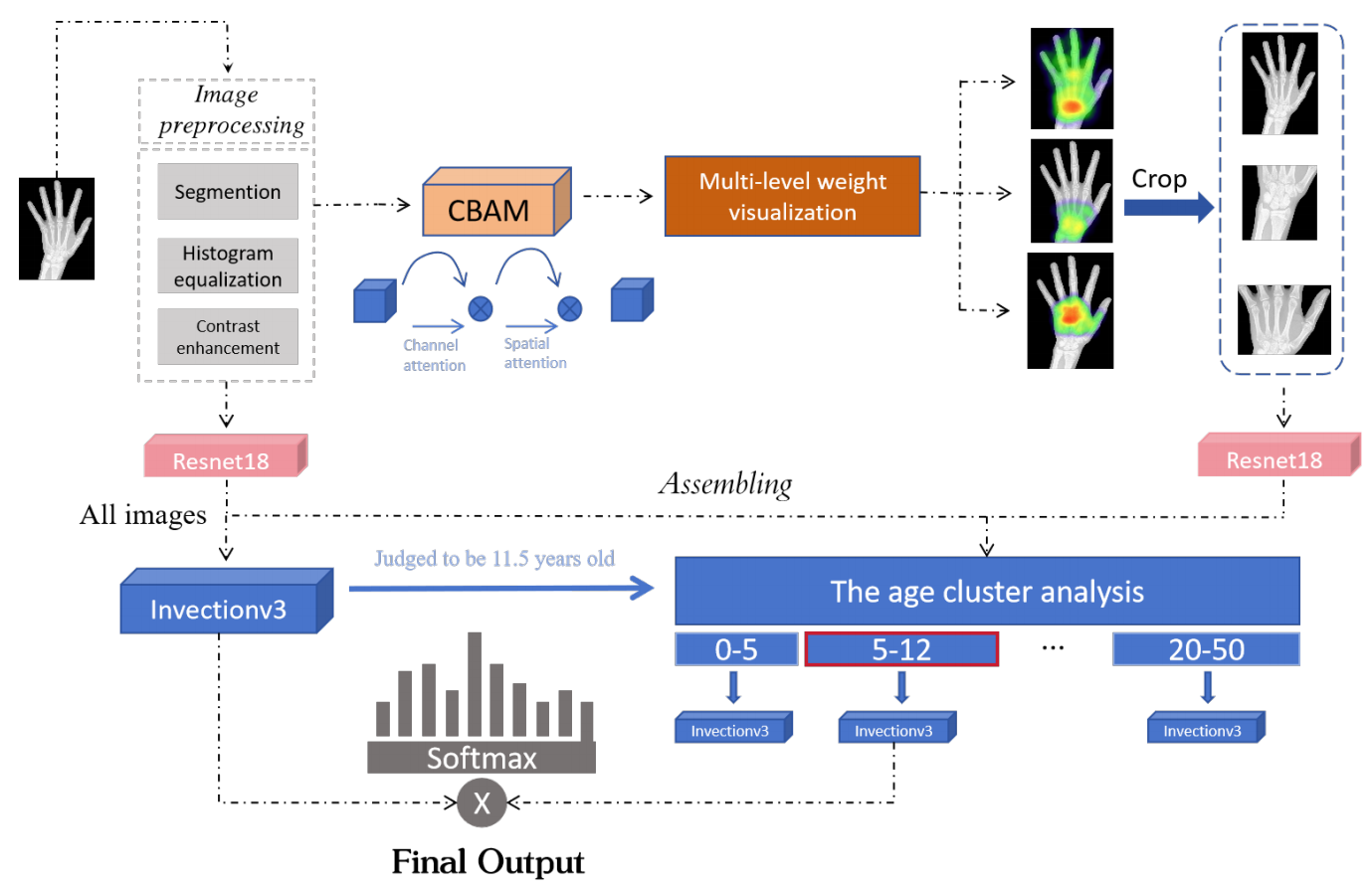
Bone Age Prediction using a Convolutional Neural Network-based Regression Algorithm employing Attention-Directing and Cluster (Accepted)
Tao Ma*, Tinghong Ye*, Lixin Deng*, Yizhu Tang, TakMan LO, Kaip Tse, Yuzhi Huang, Zhihao Li, Renzhi Lu
- Proposed a dual-driven deep learning framework (ACNNet) for bone age assessment, combining cluster analysis and attention-guided CNN regression to hierarchically enhance age-sensitive anatomical features in hand radiographs.
- Introduced an adaptive spatial attention module (ASAM) for ROI detection and a Bayesian-optimized ensemble strategy to fuse predictions from age-specific subsets, improving interpretability and accuracy.
🎖 Honors and AwardS
- 2025.09 National Scholarship
- 2025.09 School merit student
- 2025.07 First prize (Runner-up) in the National College Student Robot Competition (2025)
- 2025.07 Second prize in the racing track of National College Student Robot Competition (2025)
- 2025.07 Second prize in the obstacle track of National College Student Robot Competition (2025)
- 2025.07 Second prize in the cross-country track of National College Student Robot Competition (2025)
- 2024.11 Third prize in the Global Campus AI Algorithm Elite Competition National Finals
- 2024.10 Science and technology innovation scholarship
- 2024.07 First prize (Runner-up) in the National College Student Robot Competition (2024)
- 2024.07 First prize (Third place) in the racing track of National College Student Robot Competition (2024)
- 2024.07 First prize (Fourth place) in the obstacle track of National College Student Robot Competition (2024)
- 2024.07 Third prize in the cross-country track of National College Student Robot Competition (2024)
- 2024.05 Third prize of Chinese College Student Computer Design Competition provincial competition
- 2024.05 Second prize in Huazhong Cup college students mathematical modeling contest
- 2024.02 Honorable Mention in Mathematical Contest In Modeling(MCM/ICM)
- 2023.10 School merit student
- 2023.09 Second prize in National College students Mathematical Modeling Contest provincial competition
- 2023.08 Second prize in Wasu Cup National college students mathematical Modeling Contest
- 2023.07 First prize in the National College Student Robot Competition (2023)
- 2023.05 Outstanding Winner in School robot contest (rk4)
- 2023.02 Freshmen study for merit scholarships
📖 Education
- 2026.09 - 2031.06(Expected), Zhejiang University, Ph.D. in Computer Science and Technology
- 2022.09 - 2026.06(Expected), Huazhong University of Science and Technology, B.E. in Artificial Intelligence
💻 Internship
- 2025.08, Research Intern, School of Artificial Intelligence (SAI), Shanghai Jiao Tong University (Advised by Prof. Wenzhao Lian)
- 2025.04 - 2025.07, Research Intern, National Engineering Laboratory for Video Technology, Peking University
- 2024.05 - 2025.03, Research Intern, Intelligence Manufacturing and Data Science Laboratory, Huazhong University of Science and Technology