
Welcome to my personal website! I am Tinghong Ye (Chinese: 叶庭宏), a highly motivated and passionate undergraduate student majoring in Artificial Intelligence at Huazhong University of Science and Technology (HUST). I am currently a senior (Class of 2022) with a strong academic record and a deep interest in Embodied AI, particularly in motion foundation model and MLLM.
My current research centers on Generative Embodied AI, aiming to scale up robot learning by bridging the gap between vast internet-scale data and physical execution. I specifically focus on constructing Motion Foundation Models and Generalist Humanoid Policies through the following angles:
-
Unified Cross-Modal Representations: Utilizing Discrete Motion Tokenization to align continuous actions with language/video embeddings, enabling Multi-modal LLMs to autoregressively generate complex robot behaviors.
-
Video-Driven Policy Learning: Leveraging Generative Video Priors and Diffusion Transformers (DiT) to model predictive dynamics, serving as high-fidelity simulators for robust Closed-loop Control.
-
Scalable Humanoid Control: Developing Retargeting-free imitation learning frameworks. By aligning human video latents with robot proprioception, I aim to achieve adaptive Whole-Body Control (WBC) without manual motion retargeting.
Engineering Background Prior to my research on generative models, I established a full-stack foundation in robotics during the first three years of my undergraduate studies. My early work integrated Non-linear Control with Perception Systems, where I implemented MPC and CLF-CBF algorithms for locomotion and navigation of quadruped robots and distributed swarms. I developed multi-modal perception pipelines fusing LiDAR and depth sensors, and designed VLM-based tactical analysis systems requiring complex spatial reasoning. These engineering efforts provided me with critical insights into the Sim2Real gap that now informs my data-driven research.
🔥 News
- 2025.12: 🤗 Started Interning at the AIGC Algorithm Group, Hithink RoyalFlush (同花顺), exploring the intersection of Video Generation and Embodied AI.
- 2025.09: 🎉 Will be joining the DCD Lab, Zhejiang University, focusing on Embodied AI and MLLM.
- 2025.08: 🤗 Started Research Intern at School of Artificial Intelligence (SAI), SJTU, focusing on collision-free motion control for Franka Emika robots.
- 2025.04: 🤗 Started Research Intern at National Engineering Laboratory for Video Technology – Shenzhen Division, PKU, focusing on 3D Understanding based on MLLM and CoT.
- 2024.05: 🤗 Started Research Intern at Intelligence Manufacturing and Data Science Laboratory, Hust, focusing on Robotics Path-Planning and Control Algorithm.
📝 Publication (* denotes the equal contribution.)

A Distributed Quadratic Programming (QP)-based Safe Formation Control Scheme for Multiple Quadruped Robots (Rejected)
Danfu Liu*, Peixuan Song*, Tinghong Ye, Qichen Liang, Jinhui Du, Lijun Zhu and Han Ding
- Introduced a hierarchical control strategy: an upper-layer distributed planner for trajectory generation and a lower-layer MPC-based locomotion controller for trajectory tracking.
- Demonstrated effectiveness through simulations and real-world experiments with Unitree A1 robots, achieving formation control in complex obstacle environments while meeting safety constraints.
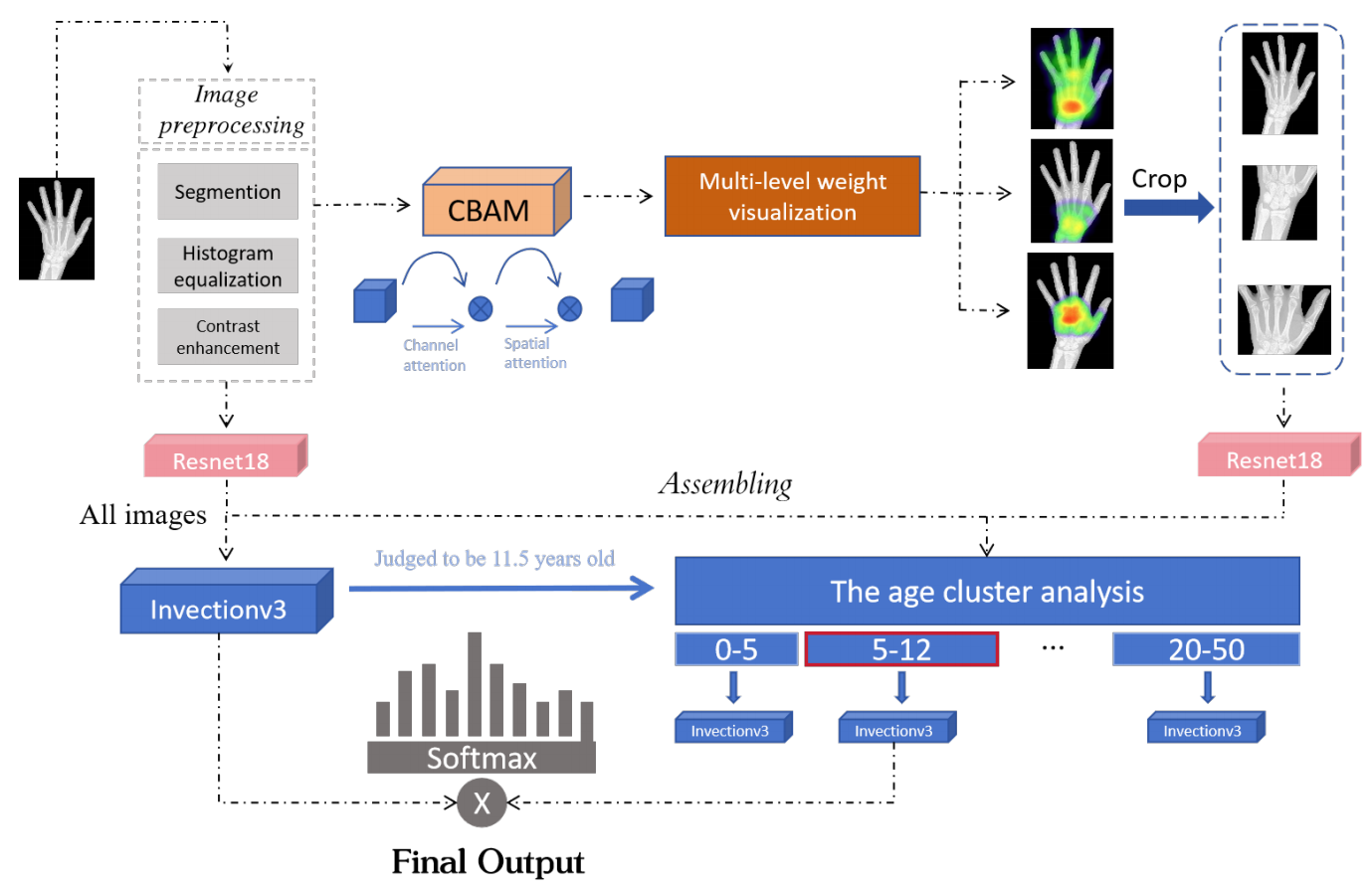
Bone Age Prediction using a Convolutional Neural Network-based Regression Algorithm employing Attention-Directing and Cluster (Accepted)
Tao Ma*, Tinghong Ye*, Lixin Deng*, Yizhu Tang, TakMan LO, Kaip Tse, Yuzhi Huang, Zhihao Li, Renzhi Lu
- Proposed a dual-driven deep learning framework (ACNNet) for bone age assessment, combining cluster analysis and attention-guided CNN regression to hierarchically enhance age-sensitive anatomical features in hand radiographs.
- Introduced an adaptive spatial attention module (ASAM) for ROI detection and a Bayesian-optimized ensemble strategy to fuse predictions from age-specific subsets, improving interpretability and accuracy.
🎖 Honors and AwardS
- 2025.09 National Scholarship
- 2025.09 School merit student
- 2025.07 First prize (Runner-up) in the National College Student Robot Competition (2025)
- 2025.07 Second prize in the racing track of National College Student Robot Competition (2025)
- 2025.07 Second prize in the obstacle track of National College Student Robot Competition (2025)
- 2025.07 Second prize in the cross-country track of National College Student Robot Competition (2025)
- 2024.11 Third prize in the Global Campus AI Algorithm Elite Competition National Finals
- 2024.10 Science and technology innovation scholarship
- 2024.07 First prize (Runner-up) in the National College Student Robot Competition (2024)
- 2024.07 First prize (Third place) in the racing track of National College Student Robot Competition (2024)
- 2024.07 First prize (Fourth place) in the obstacle track of National College Student Robot Competition (2024)
- 2024.07 Third prize in the cross-country track of National College Student Robot Competition (2024)
- 2024.05 Third prize of Chinese College Student Computer Design Competition provincial competition
- 2024.05 Second prize in Huazhong Cup college students mathematical modeling contest
- 2024.02 Honorable Mention in Mathematical Contest In Modeling(MCM/ICM)
- 2023.10 School merit student
- 2023.09 Second prize in National College students Mathematical Modeling Contest provincial competition
- 2023.08 Second prize in Wasu Cup National college students mathematical Modeling Contest
- 2023.07 First prize in the National College Student Robot Competition (2023)
- 2023.05 Outstanding Winner in School robot contest (rk4)
- 2023.02 Freshmen study for merit scholarships
📖 Education
- 2026.09 - 2031.06(Expected), Zhejiang University, Ph.D. in Computer Science and Technology
- 2022.09 - 2026.06(Expected), Huazhong University of Science and Technology, B.E. in Artificial Intelligence
💻 Internship
- 2025.12 - now, Research Intern, Hithink RoyalFlush Information Network Co.,Ltd..
- 2025.08, Research Intern, School of Artificial Intelligence (SAI), Shanghai Jiao Tong University (Advised by Prof. Wenzhao Lian)
- 2025.04 - 2025.07, Research Intern, National Engineering Laboratory for Video Technology, Peking University
- 2024.05 - 2025.03, Research Intern, Intelligence Manufacturing and Data Science Laboratory, Huazhong University of Science and Technology